CPYR
Get StartedCPYR
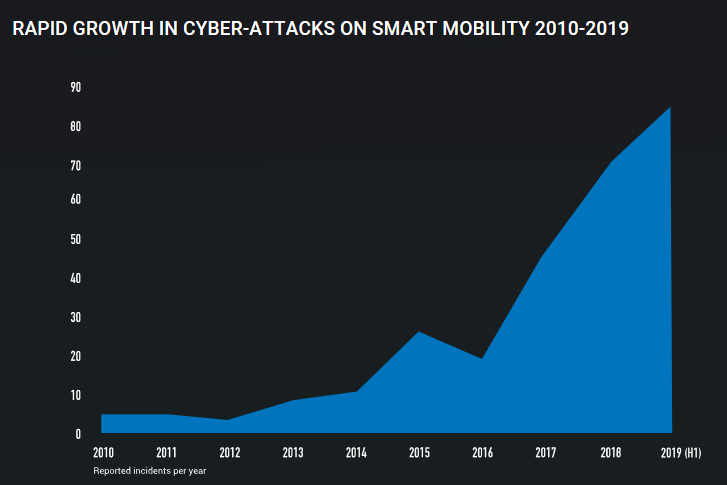
The unprecedented rise of Penetration &Malware attacks with it’s whole new level of sophistication, the conventional method of signature based protection with after-event actions is becoming more and more inefficient , and the ability to prevent threats is becoming more appealing aspect. With AI-based protection using CPYR, you will be able to stay ahead of the threats .
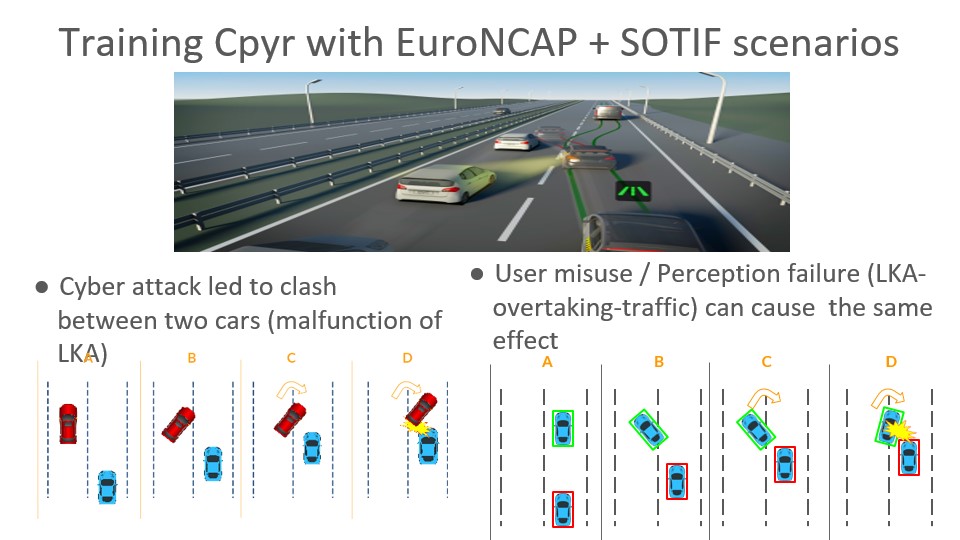
In our work, we followed the major steps recommended by safety intended functionality standard SOTIF. SOTIF is the standard responsible for ensuring safety for AI models for the automotive industry. We show a real safety critical scenario that affects a core function of a vehicle. Our scenario focuses on abnormal behavior that is created due to legitimate actions, Such a scenario could occur due to driver misbehavior or due to a cyber attack.
About Cpyr
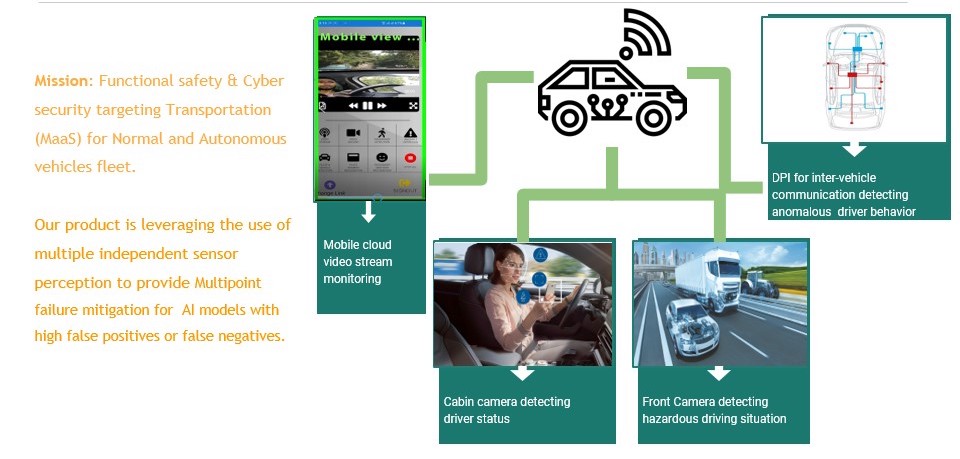
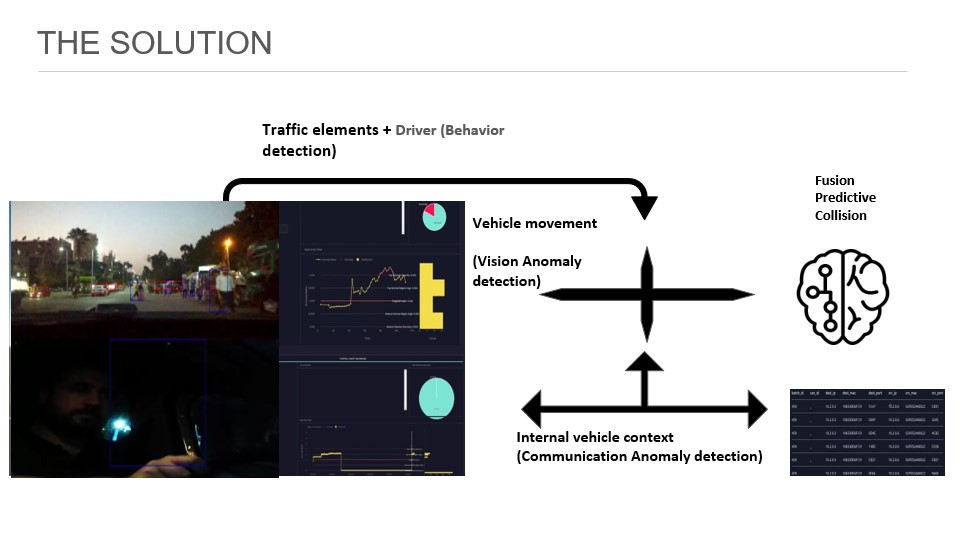
Smooth avoidance of potential collision not only from situation perspective but also from driver readiness perspective. that means a prediction based on complete situational awareness is needed to be provided real time
Over the Air update for Cars during operation
During the security operation running on the cloud, not only it is essential to keep the edge device monitored , but it is crucial to update the AI models running on this device real time. for example The need when the security officer observes a high rate of False positives for example , and there is a need to update the thresholds real time. In this demo we will be inferring on the model running on the I O T device different thresholds through the Azure Cloud during runtime .
Cpyr prediction on actual roads
Cpyr detecting reckless driving behavior from neighboring vehicles on a crowded street, that could cause hazardous situations. Giving a heads-up to the driver to provide a predictive collision alert .
Description for the +250 msec hazardous situation prediction :
0:13 , the white car is predicted to turn right intersecting with our cars path.0:20 till 0:23 , the KIA van is predicted to intersect our path.
1:16 till 1:25 , the motor cycles and the mini-vans are predicted reckless
1:37 , a car coming in our car's path is predicted to be a possible threat. ( and same goes for the black car intersecting)
2:09 , The small Hyundai is expected to become a possible threat if it comes in our way.
Description for the actual (0 time) hazardous situation detection:
0:15 the same white car predicted at 0:13 secs, Now detected intersecting with our cars path and Parking and seen as reckless driving.1:38 the same white car predicted at 1:37 secs is now making a quick U Turn in front of our car, and seen as reckless driving.(and same goes for black car with a high speed maneuvering to by pass our car)
2:11 , The same small Hyundai, isn't seen as a possible cause for hazardous situation